

Диспетчерская централизация на базе микроЭВМ и программируемых контроллеров (ДЦ-МПК) является первой отечественной микроэлектронной системой управления движением поездов на железнодорожном участке. Опытный образец системы был включен в постоянную эксплуатацию в октябре 1995 г. Это результат многолетней работы ученных и специалистов Центра компьютерных железнодорожных технологий.
ДЦ-МПК является современной, открытой и наращиваемой системой, увязывается с любыми типами релейных систем электрической централизации (ЭЦ), в том числе с ЭЦ блочного типа. Она легко адаптируется к условиям конкретного полигона управления, как на этапе проектировании, так и при его модернизации во время эксплуатации.
ДЦ-МПК обеспечивает реализацию современных принципов управления эксплуатационной работой и предназначена для обеспечения заданной пропускной способности железных дорог и безопасности движения при централизованном (диспетчерском) управлении устройствами СЦБ на станциях и перегонах.
Система прошла все стадии испытаний, рекомендована ОАО «РЖД» для тиражирования и проектируется на основе типовых материалов для проектирования (ТМП-410512), разработанных институтом Гипротранссигналсвязь.
Аппаратура системы ДЦ-МПК используется:
|
 |
Система ДЦ-МПК состоит из пункта управления (ПУ), контролируемых пунктов (КП), каналообразующей аппаратуры и сетевого оборудования. На уровне КП и ПУ применяются РС-совместимые промышленные средства вычислительной техники со 100% резервированием всех составных элементов ПУ и КП (как вычислительных средств, так и устройств сопряжения).
В ДЦ-МПК могут использоваться любые типы каналов связи (ВОЛС, кабельные и воздушные линии связи, каналы тональной частоты). В составе оборудования для работы по физическим каналам имеются усилительные пункты и трансляционные модули, модули перехода с четырехпроводного ТЧ канала в физическую 2-х или 4-х проводную линию. Обеспечивается любая конфигурация структуры сети передачи данных.
Система ДЦ-МПК имеет возможность расширения своих функций и состава аппаратных средств, как на ПУ, так и на КП.Кроме традиционных, ДЦ-МПК интегрирует также следующие функции:
В состав технических средств ПУ входят:
Для одного диспетчерского круга используются, по меньшей мере, 2 промышленных компьютера: основной (т.е. реализующий команды телеуправления) и резервный, причем резервный постоянно находится в работе (так называемый «горячий» резерв). Оборудование АРМ ДНЦ размещается на специализированном рабочем столе, разработанном в ЦКЖТ в соответствии с требованиями СанПиН.
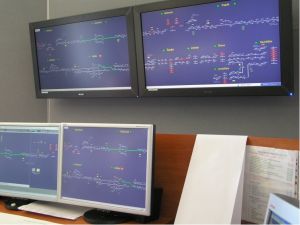
Для отображения оперативной информации используются жидкокристаллические дисплеи с диагональю 20-21 дюйм и разрешением экрана от 1280x1024 и выше. В зависимости от полигона управления могут применяться многомониторные схемы отображения оперативной информации. Кроме этого, в центрах диспетчерского управления в качестве табло коллективного пользования применяются широкоформатные средства отображения (видеопроекционные установки, плазменные или жидкокристаллические панели). |
 |
При возникновении нештатных ситуаций (отказы устройств, отключение электропитания, отклонение поезда от графика движения и т.п.) формируются предупреждающие речевые сообщения. Для обеспечения непрерывности перевозочного процесса при неисправности устройств СЦБ предусматривается снятие блокировочных зависимостей и передача ответственных команд.
АРМ ШНД позволяет просматривать протоколы работы ДНЦ, изменения телесигнализации и телеизмерений, выполнять диагностику оборудования ПУ, КП и каналов связи.
В ДЦ-МПК предусмотрено протоколирование телесигнализации и команд ТУ в базу данных на сервере протоколов. Здесь хранятся события за последние 62 дня (данный параметр настраиваемый). В системе ДЦ-МПК реализован программный сервер единого времени. Предусмотрена возможность автокорректировки системного времени на серверах через спутниковые антенны GPS, либо «вручную».
Питание устройств ПУ ДЦ-МПК осуществляется от двух независимых фидеров. Для обеспечения устойчивой работы системы при перебоях в электропитании все устройства включаются в питающую сеть системы бесперебойного питания УЭП-МПК на основе мощных источников бесперебойного питания UPS с резервированием от ДГА.
Помимо управления перевозочным процессом, ДЦ-МПК позволяет осуществлять телеуправление устройствами энергоснабжения. Для этого развертывается АРМ энергодиспетчера, аналогичный по составу оборудования с АРМом ДНЦ. АРМ энергодиспетчера позволяет управлять объектами энергоснабжения:
Управление этими объектами и контроль их состояния передаются по каналам ТУ-ТС ДЦ-МПК, а в ПУ переадресуются АРМу энергодиспетчера.
Система ДЦ-МПК обеспечивает сопряжение с другими автоматизированными системами при подключении их на уровне пункта управления через шлюз с АСУ верхнего уровня, в том числе:
ДЦ-МПК обеспечивает поддержку следующих типов структур каналов связи:
Обмен данными между ПУ и КП может осуществляться с использованием цифровых и аналоговых каналов связи. Надежность обмена данными по каналам связи достигается их резервированием. Работа системы по физическим линиям связи (кабельной или воздушной) обеспечивается специализированной каналообразующей аппаратурой ДЦ-МПК, которая состоит из универсального модема и блока сопряжения с линией (БСМ). Эта аппаратура позволяет работать с двухпроводной или четырехпроводной линией связи, а также с аппаратурой тонального уплотнения каналов. В случае использования волоконно-оптических линий связи (ВОЛС) аппаратура ПУ и КП подключается непосредственно к коммутаторам или маршрутизаторам ВОЛС. В настоящее время внедряются круги ДЦ с новой аппаратурой связи на основе SDH, PDH и др., с которой система ДЦ-МПК стыкуется при помощи интерфейсов G703.1, RS-422 и др. |
 |
ДЦ-МПК поддерживает протоколы передачи информации систем ЧДЦ-66, «Луч», «Нева», ВРТФ, ЛИСНА.
В центрах диспетчерского управления организуется локальная сеть, в которую через коммутатор (маршрутизатор) подключаются компьютеры АРМ ДНЦ, АРМ ШНД, сервер локальной сети, где ведется протоколирование работы всех АРМов, сервер единого времени. АРМы диспетчеров других хозяйств (СЦБ, локомотивного, вагонного, электроснабжения) могут быть подключены к локальной сети АРМ поездных диспетчеров.
Система обеспечивает возможность информационного взаимодействия с системами ДК на уровнях ПУ и КП. Для удаленного мониторинга системы используется шлюз, обеспечивающий контроль функционирования системы через глобальную вычислительную сеть intranet РЖД.
Программное обеспечение ДЦ-МПК это комплекс средств, поставляемый в комплекте с системой для установки на рабочие места операторов, серверы, шлюзы, а также на контролируемые пункты ДЦ-МПК. Все программное обеспечение ДЦ-МПК использует общую открытую расширяемую архитектуру, оно разработано и базируется на платформе OS Linux. Разработка программного обеспечения (ПО) выполнена с учетом открытых стандартов промышленного программирования POSIX и с применением распространенной и стандартизованной распределенной сетевой компонентной модели OMG CORBA. |
 |
Для разработки программных модулей используется единый объектно-ориентированный язык программирования С++. Современный подход, реализованный в ПО ДЦ-МПК, подразумевает не только использование объектно-ориентированного программирования, но и применение компонентной модели приложения, когда задача делится на модули, модули на компоненты — законченные функционально скомпилированные библиотеки исполнимого кода. Для автоматизации сборки компонент в целое прикладное приложение используется распространенный и документированный язык Python.
Адаптация ПО на конкретном полигоне управления происходит путем указания значений параметров компонент без повторной компиляции их исполнимого кода С++. Параметры хранятся в открытом формате в технологической базе данных на основе XML.
Из набора функциональных модулей компонуется конкретное приложение: АРМ ДНЦ, сервер протоколирования или шлюз. Совместная работа модулей (их компонент) осуществляется под управлением сервера приложений. В инсталляционный пакет конкретного полигона управления входит, кроме сервера приложений, также приложение пользовательского интерфейса.
Все вышеперечисленное ПО является базовым программным обеспечением. Оно отлажено, протестировано, состав компонент с конкретными версиями не меняется от объекта к объекту, меняются лишь технологические данные информация о компоновке и инициализации компонент модулей на конкретном полигоне. Такая компоновка данных позволяет без существенных затрат времени регулировать станции при объединении в участки ДЦ-МПК.
Централизованное управление блок-постами и удаленными районами крупных станций с одного рабочего места повышает экономическую эффективность функционирования участка и железной дороги в целом. Применяемая на КП ДЦ-МПК аппаратура позволяет связать отдаленные блок-посты c ПУ крупной станции в единую информационную среду, которая, в свою очередь, включается в информационное поле ДЦ-МПК на участке железной дороги. Технические возможности программно-аппаратных средств позволяют также осуществить управление соседними станциями с опорной, реализовав тем самым функции мини-ДЦ.
Для удаленного управления используется резервированный дуплексный канал по существующей или проектируемой линии связи, которая подключается к каналообразующей аппаратуре КТС УК. Переключение режимов управления блок-постами (резервное/диспетчерское) производится ключом-жезлом резервного управления. Реализацию команд в обоих режимах управления производит КТС УК, что дополнительно сокращает количество реле РУ, которые традиционно используются для переключения управляющих цепей. Схема реле РУ строится только для исключения перехода с резервного управления на диспетчерское при постановке стрелки на макет, при отправлении хозяйственного поезда, искусственном размыкании секций маршрута и т.п. Разделение режимов управления осуществляется аппаратными и программными средствами КТС УК, которые постоянно контролируют состояние реле РУ.
КП ДЦ-МПК дополнительно обеспечивает контроль состояния противопожарной системы и охранной сигнализации блок/постов.
1992 г. — предварительные испытания;
1995 г. — ввод в постоянную эксплуатацию на Октябрьской ж.д. (участок Санкт-Петербург - Сестрорецк);
1996 г. — опытная эксплуатация 4 линии Санкт-Петербургского метрополитена;
1997-2001 гг. — разработка и внедрение системы КАС ДУ на линии метрополитена (метрополитены Санкт-Петербурга, Екатеринбурга, Самары, Нижнего Новгорода);
1998 г. — создание АДЦУ НОД-3 Окт.ж.д. (участки Санкт-Петербург - Сестрорецк, Санкт-Петербург - Рощино, Рощино - Выборг, Выборг - Бусловская, Сосново - Кузнечное, Пороги - Чудово);
2003-2005 гг. — создание АДЦУ Куйбышевской ж.д. (участки Абдулино - Аксаково - Чишмы, Чишмы - Дема - Шакша, Шакша - Аша - Кропачево, Инза - Кузоватово - Новообразцово);
2005 г. — мини-ДЦ Даниловского узла Северной ж.д. (управление двумя предузловыми блок-постами);
2006 г. — разработка типовых материалов для проетирования (410512-ТМП);
2006 г. — создание АДЦУ Литовской ж.д. (Вильнюсский узел, участки Мажекяй - Куршенай - Шяуляй, Шяуляй - Радвилишкис);
2007 г. — внедрение Центра диспетчерского управления на Минском метрополитене;
2007 г. — регулировка ДЦ-МПК на участке Тенгиз - разъезд 8 ОАО «ТенгизШевройл» (Казахстан)